Flexible Robot Arm: Part 1 - Rapid Prototyping
After an extended holiday in Wellington, New Zealand, I'm getting back into making my mechanical creations. My next project is a flexible robot arm that will be able to operate in a inverted dome-shaped workspace. The arm's design has been influenced by the great work and research Festo Bionic have completed in the past, with their BionicTripod system and other flexible arm designs.
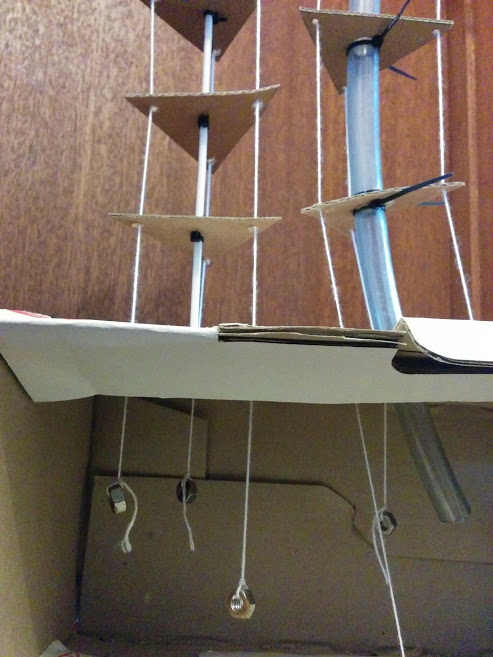
As shown below in the two very basic prototypes I have constructed, the arm's structure will consist of a central spine, with joint plates and 3 cables that will act like tendons. By pulling/pushing each cable in a coordinated way the position of the gripper end of the arm can be controlled.
From using these prototypes, I've made the following project observations so far:
- The spine of the arm needs to be flexible enough to be curved easily using the cable control system, but rigid enough to return a neutral straight position when no force is being applied to it.
- The number of joint plates used will help determine how sharply the arm can curve. The more plates used, the sharper the curve will be.
- The thicker plastic tube spine is not flexible enough, and requires an unreasonable amount of force to curve it in the desired direction. It also has an existing curve in it so it will not return to a neutral straight position.
- The thinner spined prototype uses a piece of curtain rod which consists of a coiled spring within a plastic shell. This allows the spine to be flexible or rigid, as required for this project.
The next steps will be to scale up the arm length, invert it inside a suitable frame structure, and then add a mechanical system to control the length of the tendon cables.