Simple Ultrasonic Obstacle Avoidance
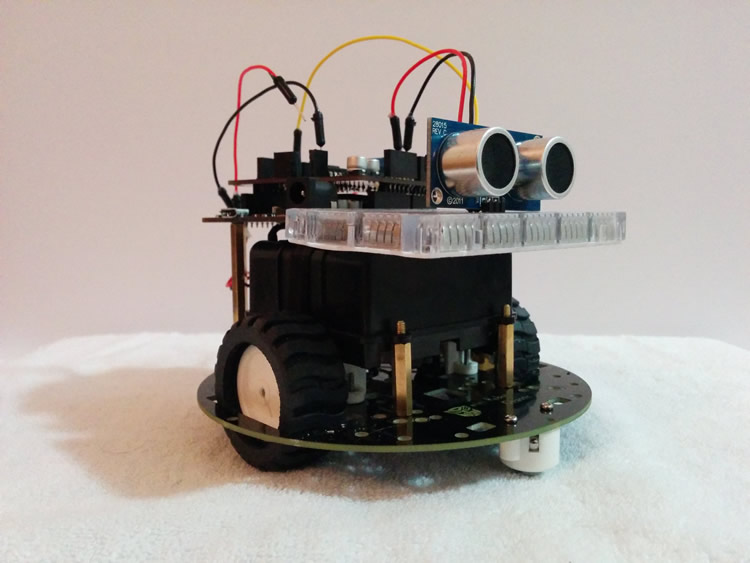
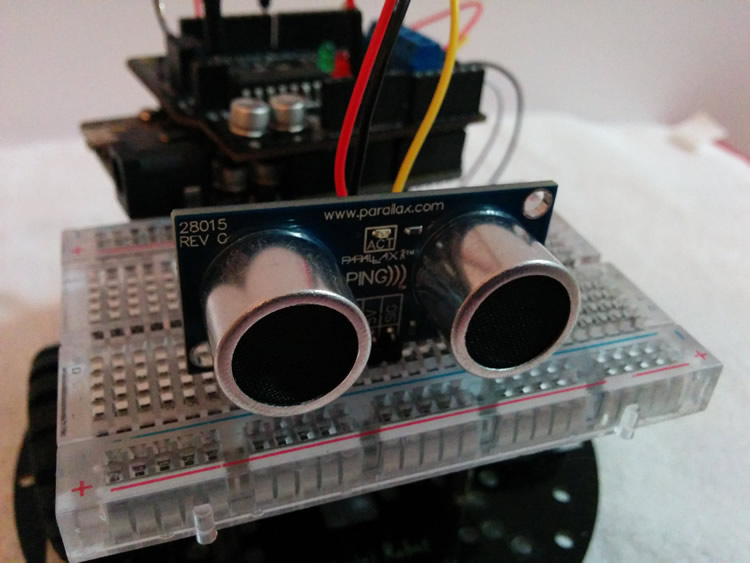
Inspired by an article by John Boxall for Little Bird Electronics I recently bought myself a Parallax Ping))) Ultrasonic Distance Sensor to try out. This great little sensor can measure distances between ~2cm and ~3m in length.
Having already purchased a motor base previously I decided to have a go at making a basic roving platform that could avoid obstacles in its path.
Parts list
- A Parallax Ping))) Ultrasonic Distance Sensor (source)
- A 2WD miniQ Robot Chassis (source)
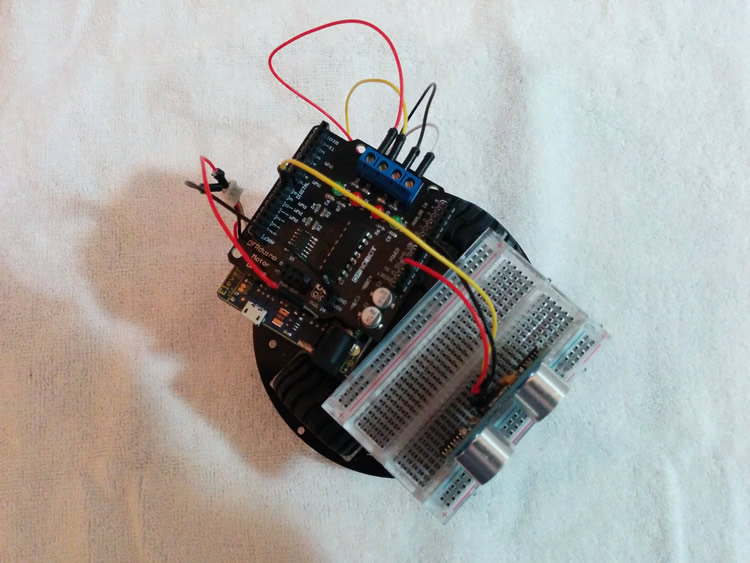
- An Arduino Uno R3 with 1 Amp motor shield (any Arduino compatible board will work)
- Spare switchable 6/12V battery case
- Assorted spaces, screws and wires
The rig
Bonus video
Programming
The Arduino code makes the robot follow these steps:
- Drive forward until an obstacle is detected less than 30cm away from the Ping))) sensor.
- Drive backward for a set time and then turn left a small amount.
- Continue driving forward again.
/*
Parallax Ping))) ultrasonic sensor code from tronixstuff.wordpress.com - CC by-sa-nc
http://littlebirdelectronics.com.au/blogs/news/4724922-tutorial-parallax-ping-ultrasonic-sensor
Connect Ping))) signal pin to Arduino digital 8
Motor shield control functions added by Peter Wallhead.
This example code is in the public domain.
*/
int signal=8;
int distance;
unsigned long pulseduration=0;
// Assign motor shield pins that start and stop the motor.
int PWM1 = 5;
int PWM2 = 6;
// Assign motor shield pins that dictate motor direction.
int DIR1 = 4;
int DIR2 = 7;
// Set default motor speed.
int SPEED = 130;
void setup()
{
pinMode(signal, OUTPUT);
Serial.begin(9600);
// Set pin modes to output for all those used by the motor shield.
int i;
for(i=4; i<=7; i++) {
pinMode(i, OUTPUT);
}
}
void measureDistance()
{
// Set pin as output so we can send a pulse.
pinMode(signal, OUTPUT);
// Set output to LOW.
digitalWrite(signal, LOW);
delayMicroseconds(5);
// Now send the 5uS pulse out to activate Ping)))
digitalWrite(signal, HIGH);
delayMicroseconds(5);
digitalWrite(signal, LOW);
// Now we need to change the digital pin
// to input to read the incoming pulse.
pinMode(signal, INPUT);
// Finally, measure the length of the incoming pulse.
pulseduration=pulseIn(signal, HIGH);
}
void loop()
{
// Get the raw measurement data from Ping)))
measureDistance();
// Divide the pulse length by half.
pulseduration=pulseduration/2;
// Now convert to centimetres. We're metric here people...
distance = int(pulseduration/29);
// Display on serial monitor (not required, but handy for calibration).
Serial.print("Distance - ");
Serial.print(distance);
Serial.println(" cm");
// Measure distance in front of sensor to nearest object
// while driving forward in a straight line.
if(distance > 30) {
forward(100);
} else { // If distance is less than 30cm then reverse up and turn away.
backward(500);
left(180);
}
delay(50);
}
void forward(int di) {
analogWrite(PWM1,SPEED);
analogWrite(PWM2, SPEED);
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, HIGH);
delay(di);
}
void backward(int di) {
analogWrite(PWM1,SPEED);
analogWrite(PWM2, SPEED);
digitalWrite(DIR1, LOW);
digitalWrite(DIR2, LOW);
delay(di);
}
void left(int de) {
int turn_length;
turn_length = de / 2;
analogWrite(PWM1,SPEED);
analogWrite(PWM2,SPEED);
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, LOW);
delay(turn_length);
}
void right(int de) {
int turn_length;
turn_length = de / 2;
analogWrite(PWM1,SPEED);
analogWrite(PWM2, SPEED);
digitalWrite(DIR1, LOW);
digitalWrite(DIR2, HIGH);
delay(turn_length);
}
void pause(int ti) {
analogWrite(PWM1, 0);
analogWrite(PWM2, 0);
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, HIGH);
delay(ti);
}
This is one of many Arduino projects I'll be blogging about so stay tuned and feel free to try out some of my code from my GitHub repo.